AE (Atributos de Equipe)
“O que é?”
Área que trata dos projetos sociais, marketing, conexão (com patrocinadores e comunidade) e documentação da equipe.
Eventos
Palestra aos Professores
A equipe realizou uma apresentação direcionada aos professores, com o objetivo de divulgar a FIRST e evidenciar o impacto positivo que a iniciativa pode gerar na formação dos alunos. Durante a palestra, foram abordados diversos tópicos, incluindo: o que é a FIRST1, uma visão geral de suas competições e um aprofundamento na FTC2, destacando suas áreas específicas, como o AE e o MCI, além da importância da FIRST na vida acadêmica e pessoal dos estudantes. Ademais, foi promovido um momento interativo, no qual os professores tiveram a oportunidade de controlar o robô na arena e tentar acertar os artefatos no goal.
Projetos Sociais
- Alta Cast: A equipe manteu contato com o Geek Verse e procurou organizar as necessidades em relação à parceria.
Marketing
Na área de marketing foi realizado um vídeo com o intuito de explicar sobre a FTC e disseminar a robótica pela comunidade.
Evolução para o Nacional
Com o torneio nacional se aproximando em março, em janeiro a equipe realizou diversas ações com o objetivo de nos preparar; traduzindo o portfólio para o caso de serem selecionados para etapas internacionais e para compartilhar com equipes estrangeiras, além disso, tiveram reuniões com diversas equipes para trocar experiências, fazendo planejamentos de alcance para recrutamento de futuros membros e procurando entender a prioridades da equipe em relação ao desenvolvimento de projetos sociais.
MCI (Máquina, Criatividade e Inovação)
“O que é?”
Área que trata da engenharia e programação do robô.
Engenharia
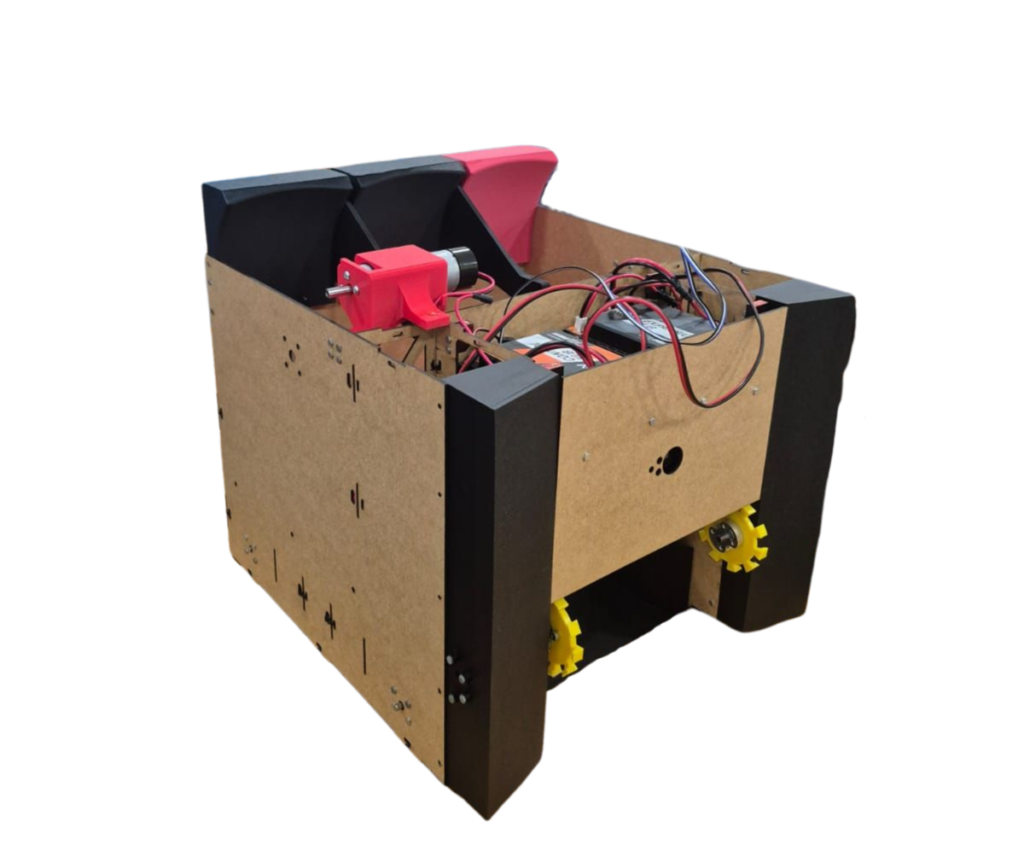
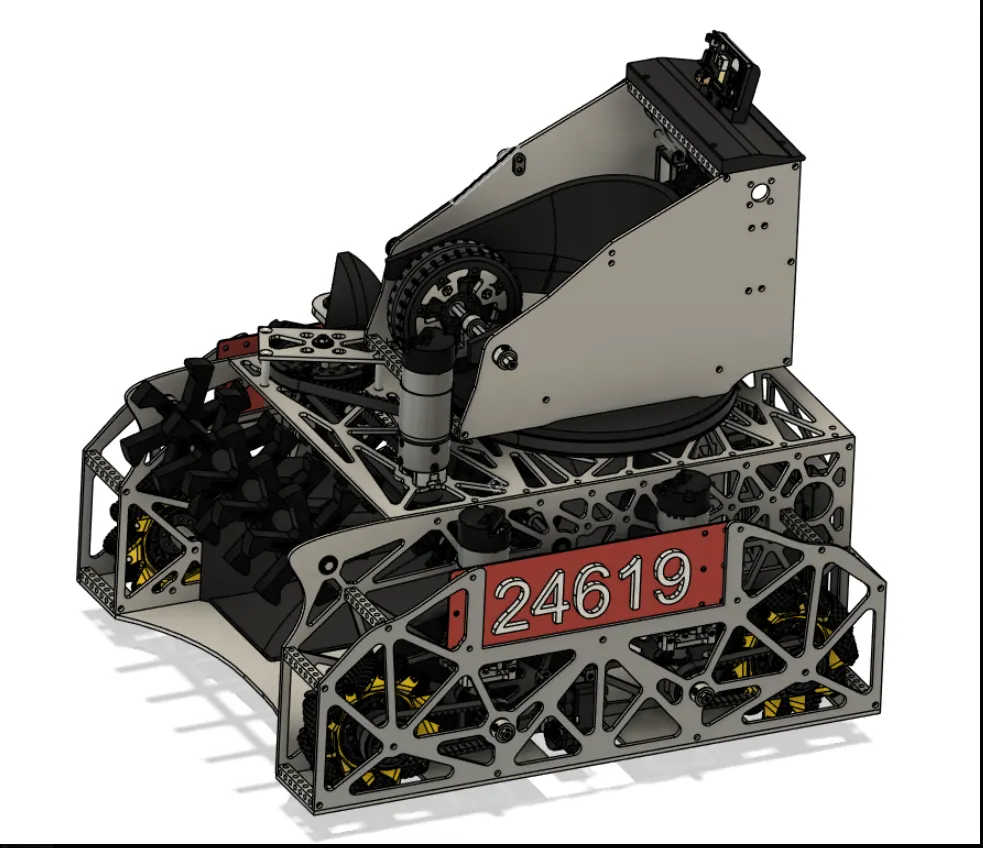
No mês de janeiro, a equipe iniciou o planejamento dos protótipos e a definição de ideias para o campeonato nacional. O principal objetivo era aumentar a pontuação e aprimorar o lançamento de artefatos no goal. A partir dessa meta, começaram a surgir as primeiras propostas de novos robôs.
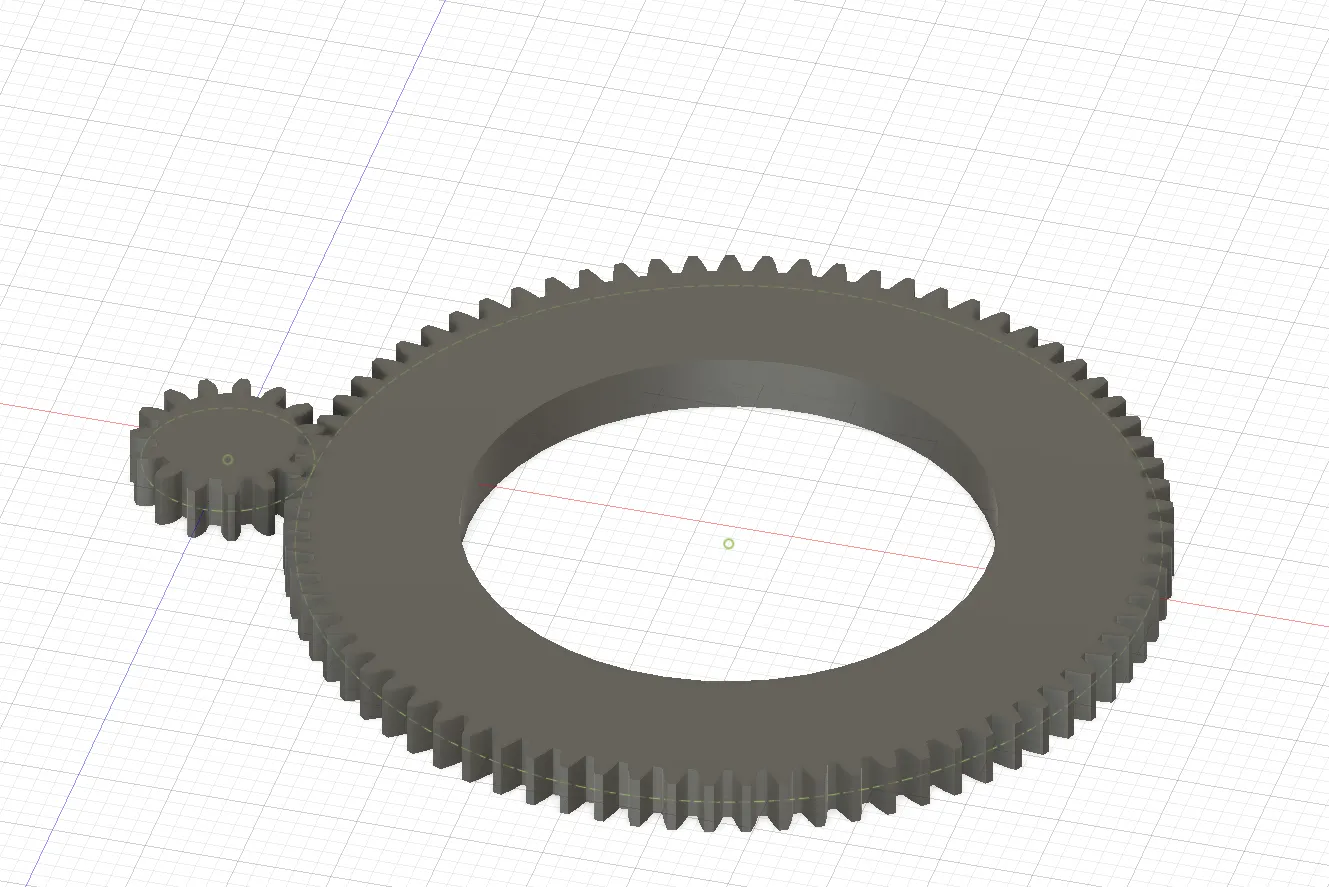
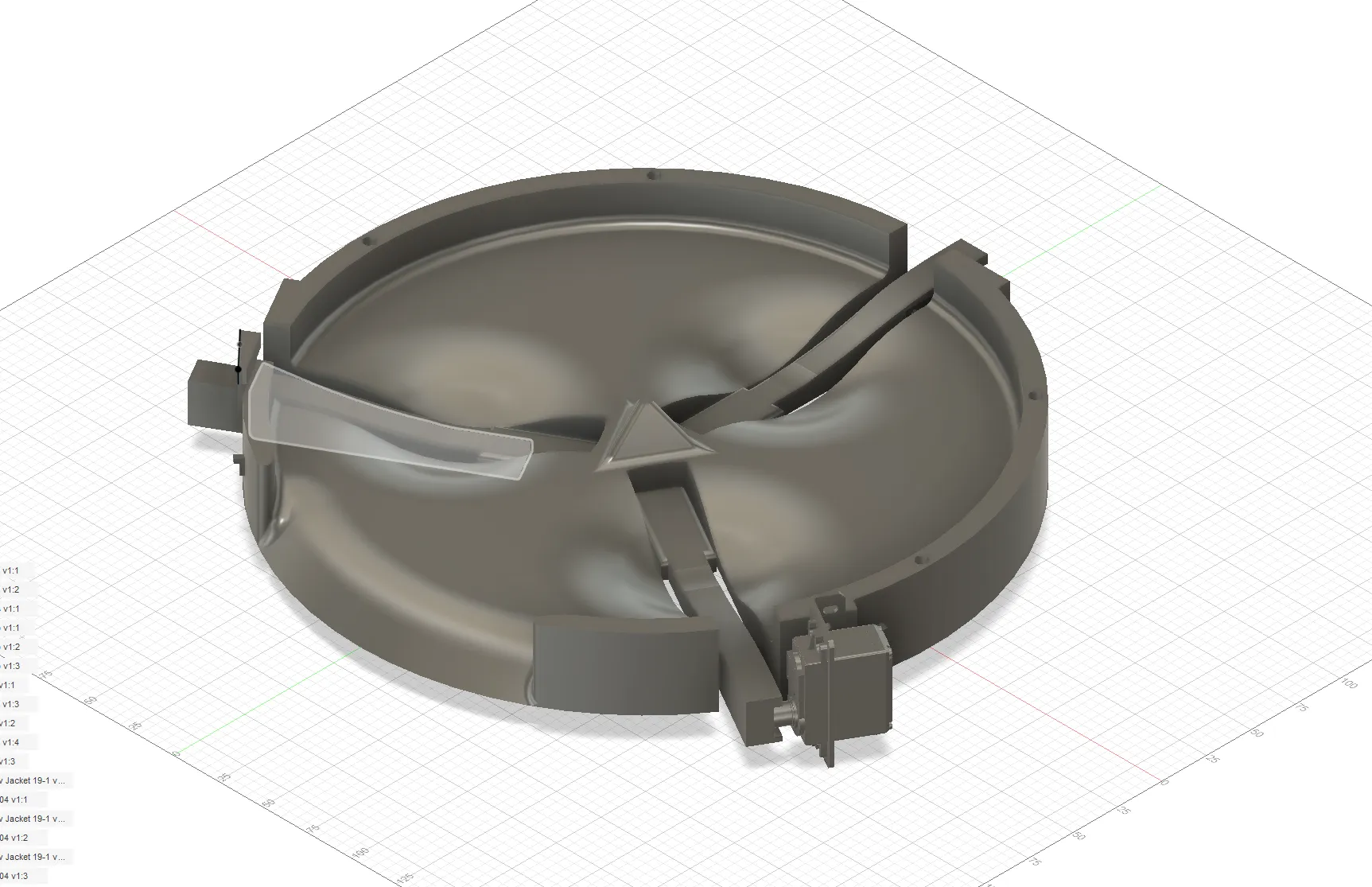
A primeira ideia consistia em um mecanismo seletor de artefatos, funcionando como uma espécie de bandeja. Com ele, seria possível escolher as cores desejadas e executar a sequência correta, aumentando a pontuação. Esse sistema trabalharia em conjunto com um novo mecanismo de torre giratória, que eliminaria a necessidade de manobrar o robô para ajustar a mira. A própria torre, com o auxílio de uma câmera, seria responsável por mirar automaticamente, enquanto os drivers focariam apenas na coleta dos artefatos.
No entanto, essa proposta foi descartada devido à dificuldade de realizar testes em um curto período de tempo, o que impossibilitaria comprovar a eficiência de mecanismos com os quais a equipe ainda não tinha tanta experiência. Ainda assim, o trabalho não foi em vão, já que a ideia do seletor de artefatos seria reaproveitada em protótipos futuros.
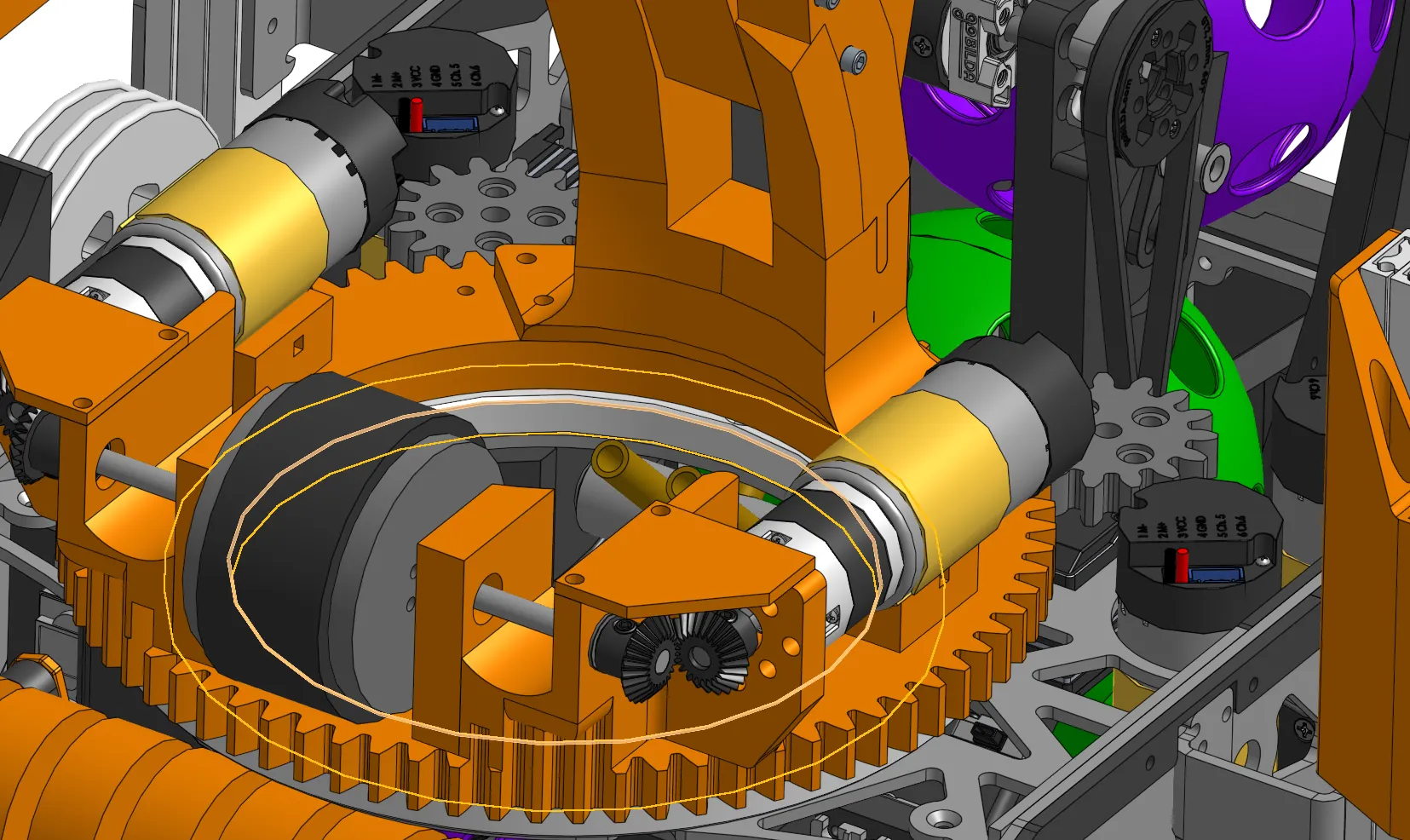
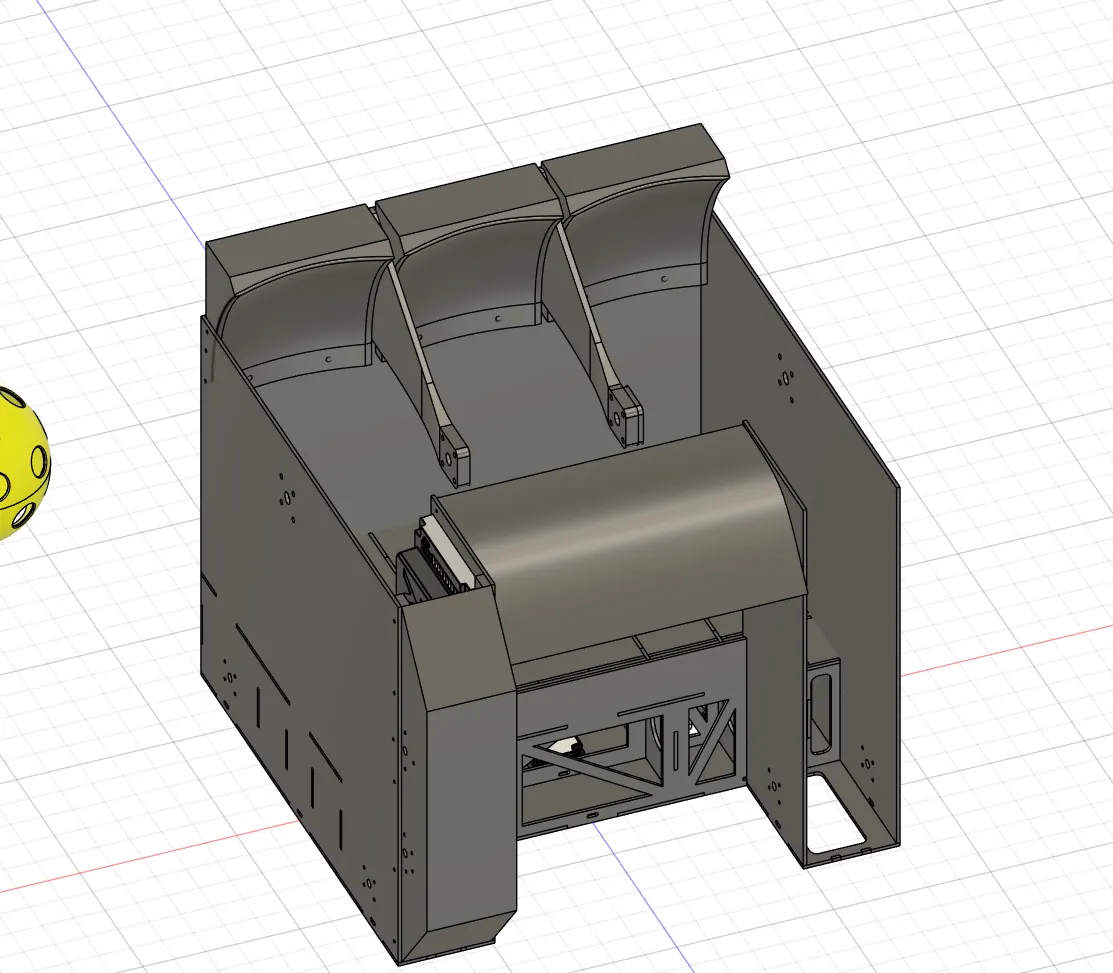
A proposta seguinte consistia em um shooter3 triplo, ou seja, três rodas em um mesmo eixo e três saídas paralelas, permitindo o lançamento simultâneo de três artefatos. Além disso, o sistema também contaria com um mecanismo de seleção de cores.
Durante os testes, a equipe tomou uma decisão estratégica: retornar ao robô utilizado no campeonato regional. Essa escolha foi baseada na análise dos prazos disponíveis em comparação com as funcionalidades desejadas. No entanto, o robô passaria por melhorias significativas, como a substituição dos motores REV Robotics4, cujo RPM5 não atendia às necessidades do mecanismo do shooter, por motores GoBilda6. Outro aprimoramento importante foi a implementação de LEDs, que auxiliam os drivers7 durante a partida ao indicar o status do robô.
Programação
No mês de janeiro, a programação teve um bom avanço, fazendo a revisão do portfólio e do planejamento para o restante da temporada, desenvolvendo uma nova forma para identificação das AprilTags8 e de se localizar na arena.
Também foi feito teste de motores e mecanismos, para que os membros entendessem as melhores opções para utilizar no robô; foram realizadas programações para que os leds que teremos no robô acendam de acordo com as cores vistas pelos sensores. Além disso, foram criadas funções para facilitar para o driver o sistema de shooter.
- Sigla para For Inspiration and Recognition of Science and Technology (para inspiração e reconhecimento de ciência e tecnologia) ↩︎
- Sigla para FIRST Robotics Competition ↩︎
- Mecanismo para lançar os artefatos durante as partidas ↩︎
- Marca que produz peças para a competição ↩︎
- Rotações por minutos ↩︎
- Marca que produz peças para a competição ↩︎
- Integrantes que controlam o robô durante a partida ↩︎
- São uma espécie de QR Code que ajudam o robô na hora de se localizar na arena ↩︎